ROOM
56
Astronautics
instance, the level of dexterity of space robots
could be largely increased by the addition of
human factors. Experiments such as reduced-
visibility tests that measure the driving ability
of humans involving a teleoperated, high-speed,
prospecting rover on an environment resembling
the lunar south pole could be conducted.
The assessment of the potential of a teleoperated,
improved-mobility rover to assist future lunar
exploration missions would be of tremendous
benefit in the accomplishment of current and
future plans for human space exploration.
References
1 A. Zak, “NASA, ISS partners quietly completing design of pos-
sible Moon-orbiting space station,” The Planetary Society, 09 03
2017. [Online]. Available:
blogs/2017/20170309-nasa-iss-partners-cislunar-station.html.
[Accessed: 16 03 2017].
2 C. M. E. Utrilla, “Asteroid-COTS: Developing the cislunar economy
with private public partnerships,” Space Policy, vol.
org/10.1016/j.spacepol.2017.03.001, 2017.
3 M. I. Malenkov, V. A. Volov, N. K. Guseva y E. A. Lazarev, “Increasing
the mobility of Mars rovers by improving the locmotion systems and
their control algorithms,” Russian Engineering Research, vol. 35, nº 11,
pp. 824-831, 2015.
4 M. I. Malenkov, V. A. Volov y E. A. Lazarev, “Quality of the locomotion
system in planetary rovers,” Russian Engineering Research, vol. 36, nº
10, pp. 800-808, 2016.
5 B. Hufenbach, K. C. Laurini, N. Satoh, C. Lange, R. Martinez, J. Hill,
M. Landgraf y A. Bergamasco, “International missions to lunar vicin-
ity and surface-near-term mission scenario of the Global Space
Exploration Roadmap,” 66th International Astronautical Congress,
Jerusalem, Israel, 2016.
6 G. Ishigami, A. Miwa y K. Yoshida, «Slope traversal controls for plan-
etary exploration rover on sandy terrain,» Journal of Field Robotics,
vol. 26, pp. 264-286, 2009.
7 L. Ding, H. Gao, Z. Deng, K. Nagatani y K. Yoshida, «Experimental
study and analysis on driving wheels’ performance for planetary
exploration rovers moving in deformable soil,» Journal of Terrame-
chanics, vol. 48, pp. 27-45, 2011.
8 G. Ishigami, A. Miwa, K. Nagatani y K. Yoshida, “Terramechanics-
based model for steering maneuver of planetary exploration rovers
on loose soil,” Journal of Field Robotics, vol. 24, pp. 233-250, 2007.
9 Higa, S.; Nagaoka, K.; Nagatani, K.; Yoshida, K., Measurement and mod-
eling for two-dimensional normal stress distribution of wheel on loose
soil, Journal of Terramechanics, 2015, vol 62, pp. 63-73
About the authors
David Rodríguez Martínez
is a Mechanical Engineer graduated in
2015 from the Carlos III University of Madrid. He served as a visiting
researcher at the West Virginia University (WV, United States) and holds
a MSc. in Space Studies from the International Space University, degree
that was sponsored by the European Space Agency. He performed a
short-term traineeship as a member of the Structures and Mechanisms
Division at ESTEC/ESA before moving to Japan where he is currently
working on planetary robotics as a prospective PhD student at Tohoku
University in Sendai, Japan.
Kazuya Yoshida
is a Professor in the Graduate School of Engineering,
Department of Aerospace Eng., Space Robotics Lab at Tohoku
University, Sendai, Japan, and Director of the Center of Robotics for
Extreme and Uncertain Environments (CREATE). His research activities
cover dynamics and control of space robotic systems, ranging from
free-flying robots to planetary exploration rovers.
traversing velocity across the lunar surface while
still being compliant with different types of
mission architectures. To this end, we will give
special attention to the requirements governing
actual lunar exploration missions such as stowage
and deployability, payload accommodation and
wheel adaptability. The different designs proposed
will be assessed by means of all-wheel and multi-
body dynamics simulations.
These 3D simulations will bring us closer to the
development of a 10 to 20 kg class rover prototype.
Field tests and further indoor testing resembling
different aspects of the lunar environment will be
performed. The objective will be to completely
characterise different parameters of the
locomotive ability of the rover such as steering,
horizontal traversing and slope climbing.
Besides locomotive-oriented experiments, the
production of a small-class prototype opens the
door to the realisation of future testing activities
on the different aspects of a lunar mission. For
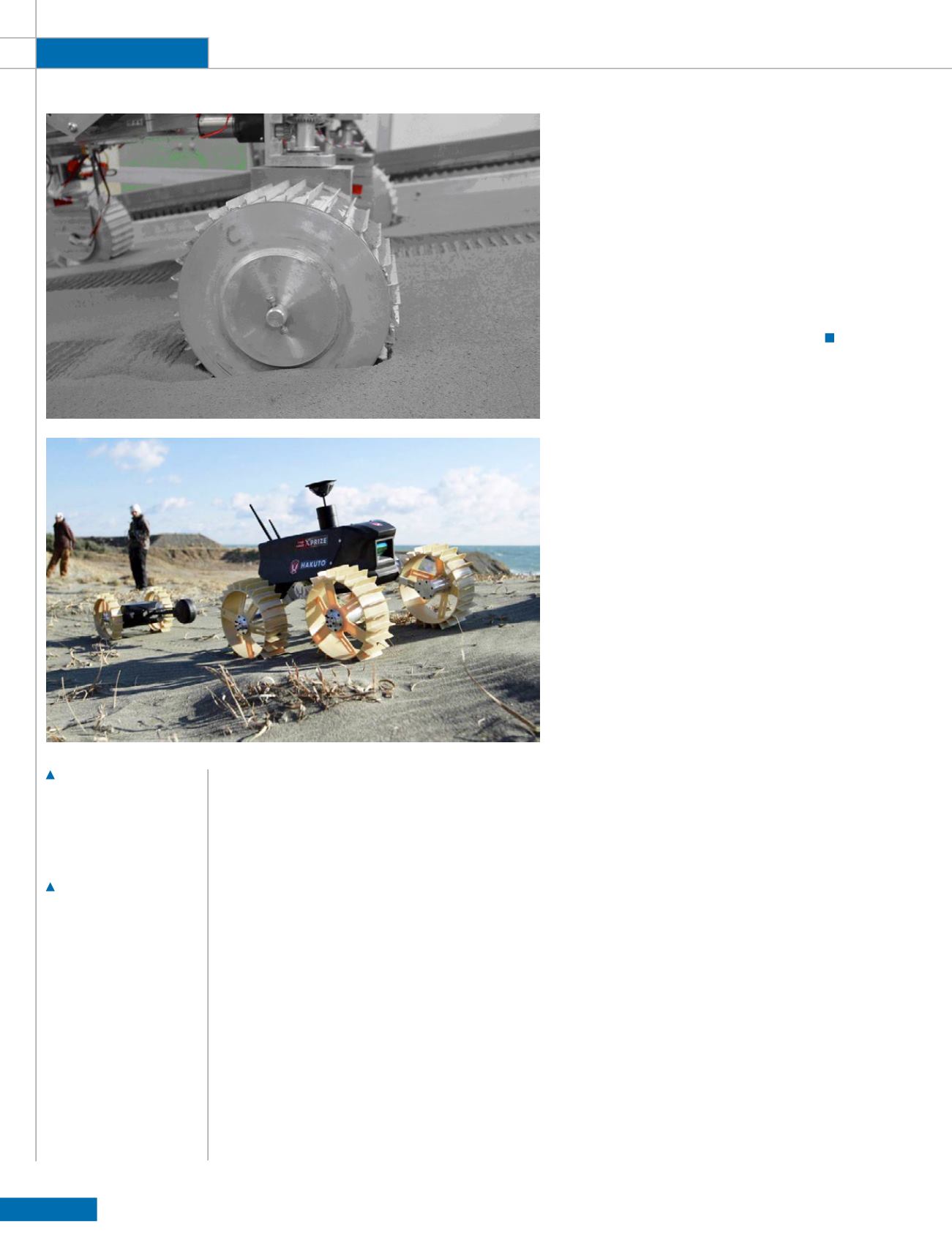
Top: ‘Traction
performance test of Space
Robotics Lab/Tohoku
University rover wheels
using lunar regolith
simulant.
Above: The Space
Robotics Lab has actively
participated in the
development of Team
Hakuto’s rover. Hakuto is
one of the five teams
currently taking part in
the Google Lunar XPRIZE.
Their rover is expected to
be launched towards the
Moon by the end of 2017.
The Japan Times/KYODO


